

El mapeo del fondo marino , también llamado imágenes del fondo marino , es la medición de la profundidad del agua de una masa de agua determinada. Las mediciones batimétricas se realizan con varios métodos, desde técnicas de sonar y Lidar hasta boyas y altimetría satelital . Varios métodos tienen ventajas y desventajas y el método específico utilizado depende de la escala del área en estudio, los medios financieros, la precisión de medición deseada y las variables adicionales. A pesar de la investigación moderna basada en computadoras, el fondo del océano en muchos lugares está menos medido que la topografía de Marte . [1]
Historia de la cartografía del fondo marino [ editar ]
{kind=link}
{kind=link}
Los primeros métodos de medición de profundidad registrados son el uso de postes de sondeo y líneas ponderadas, registrados en Egipto hace más de 3000 años, y en uso sin mejoras significativas hasta el viaje del HMS Challenger en la década de 1870, cuando sistemas similares que usaban cables y un Los cabrestantes se utilizaron para medir profundidades mucho mayores de lo que era posible anteriormente, pero este siguió siendo un procedimiento de una profundidad a la vez que requería una velocidad muy baja para la precisión. [2]
A principios del siglo XX, la cartografía del fondo marino era una tarea muy difícil. El mapeo del fondo marino comenzó con el uso de ondas sonoras , contorneadas en isóbatas y los primeros gráficos batimétricos de la topografía de la plataforma. Estos proporcionaron la primera idea de la morfología del fondo marino, aunque se cometieron errores debido a la precisión de la posición horizontal y las profundidades imprecisas. En 1957, Marie Tharp , junto con Bruce Charles Heezen, creó el primer mapa fisiográfico tridimensional de las cuencas oceánicas del mundo.
El descubrimiento de Tharp se realizó en el momento perfecto. Fue uno de los muchos descubrimientos que tuvieron lugar casi al mismo tiempo que la invención de la computadora . Las computadoras, con su capacidad para calcular grandes cantidades de datos, han facilitado mucho la investigación, incluida la investigación de los océanos del mundo.
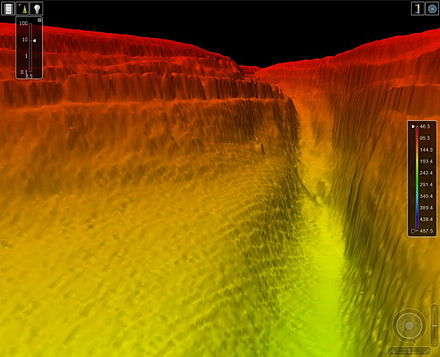
Ha habido un auge en la exploración ambiental submarina; en lugar de simplemente crear un mapa, los científicos intentan visualizar todo el lecho marino con el máximo detalle posible. Las computadoras se aprovechan aquí con su ayuda, los investigadores han logrado almacenar y analizar grandes cantidades de datos. Esto llevó a la creación del primer mapa digital del lecho oceánico mundial en 1970. [ cita requerida ] La tecnología en constante desarrollo permite que la computación tenga lugar en el equipo especial requerido para la "ortoimagen de alta resolución". Esto significa que es posible que los investigadores ya no necesiten utilizar frecuencias de sonido para realizar exploraciones marinas.
Este método se actualizó más tarde a Batimetría Láser Aerotransportada (ALB) [ cita requerida ] . ALB proporciona imágenes de mayor calidad y en color. [ cita requerida ] . Las mejoras en estos métodos de investigación y la gran cantidad de datos recibidos, almacenados y computados llevaron a la creación de una de las primeras imágenes en color del entorno submarino creadas en una computadora. [3]
Esta sección necesita ampliarse con: [2] . Puede ayudar agregando más . ( Enero de 2020 ) |
Imágenes de satélite [ editar ]
Introducción [ editar ]
Otra forma de cartografiar el fondo marino es mediante la utilización de satélites. Los satélites están equipados con sensores hiperespectrales y multiespectrales que se utilizan para proporcionar flujos constantes de imágenes de áreas costeras, proporcionando un método más factible de visualizar el fondo del lecho marino. [4]
Sensores hiperespectrales [ editar ]
Los conjuntos de datos producidos por los sensores hiperespectrales (HS) tienden a oscilar entre 100 y 200 bandas espectrales de aproximadamente 5 a 10 nm de ancho de banda. La detección hiperespectral, o espectroscopia de imágenes, es una combinación de imágenes y espectroscopias remotas continuas que producen un único conjunto de datos. [4] Dos ejemplos de este tipo de detección son AVIRIS ( espectrómetro de imágenes infrarrojas / visibles en el aire ) e HYPERION. Puede encontrar más información sobre las imágenes hiperespectrales aquí ( imágenes hiperespectrales ).
La aplicación de sensores HS en lo que respecta a la obtención de imágenes del fondo marino es la detección y el seguimiento de clorofila, fitoplancton, salinidad, calidad del agua, materiales orgánicos disueltos y sedimentos en suspensión. Sin embargo, esto no proporciona una gran interpretación visual de los entornos costeros. [4]
Sensores multiespectrales [ editar ]
El otro método de obtención de imágenes por satélite, la obtención de imágenes multiespectrales (MS), tiende a dividir el espectro EM en una pequeña cantidad de bandas, a diferencia de sus sensores hiper-espectrales asociados, que pueden capturar una cantidad mucho mayor de bandas espectrales. Puede encontrar más información sobre la detección multiespectral en Imagen multiespectral .
La detección de MS se utiliza más en el mapeo del lecho marino debido a su menor número de bandas espectrales con anchos de banda relativamente mayores. Los anchos de banda más grandes permiten una mayor cobertura espectral, que es crucial en la detección visual de características marinas y la resolución espectral general de las imágenes adquiridas. [4]
Batimetría láser aerotransportada [ editar ]
Introducción [ editar ]
La batimetría láser de alta densidad en el aire (ALB) es un enfoque moderno y altamente técnico para la cartografía del fondo marino. Desarrollado por primera vez en las décadas de 1960 y 1970, ALB es una "técnica de detección y alcance de luz (LiDAR) que utiliza luz visible, ultravioleta e infrarroja cercana para detectar de forma remota un objetivo de contorno a través de un sistema activo y pasivo". Lo que esto significa es que la batimetría láser aerotransportada utiliza luz fuera del espectro visible para detectar las curvas en el paisaje submarino. [4]
LiDAR [ editar ]
LiDAR , un acrónimo que significa Detección y rango de luz, es, según la Administración Nacional Oceánica y Atmosférica , "un método de detección remota que utiliza luz en forma de láser pulsado para medir distancias". [5]
Estos pulsos de luz, junto con otros datos, generan una representación tridimensional de lo que reflejen los pulsos de luz, dando una representación precisa de las características de la superficie. Un sistema LiDAR generalmente consta de un láser , un escáner y un receptor de GPS . Los aviones y helicópteros son las plataformas más comúnmente utilizadas para adquirir datos LIDAR en áreas amplias. Una aplicación de LiDAR es LiDAR batimétrico, que utiliza luz verde que penetra en el agua para medir también las elevaciones del lecho marino y del lecho de los ríos. [5]
Ejecución [ editar ]
ALB generalmente opera en forma de un pulso de luz no visible que se emite desde un avión en vuelo bajo y un receptor que registra dos reflejos del agua. El primero de los cuales se origina en la superficie del agua y el segundo en el fondo del mar. Este método se ha utilizado en varios estudios para cartografiar segmentos del lecho marino de varias zonas costeras. [6] [7] [8]
Ejemplos de sistemas de batimetría LIDAR comerciales [ editar ]
Hay varios sistemas batimétricos LIDAR a los que se puede acceder comercialmente. Dos de estos sistemas son la prospección Lidar aerotransportada operacional hidrográfica de exploración (SHOALS) y la sonda láser de profundidad aerotransportada (LADS). SHOALS se desarrolló por primera vez para ayudar al Cuerpo de Ingenieros del Ejército de los Estados Unidos (USACE) en el levantamiento batimétrico por una compañía llamada Optech en los años 90. SHOALS se realiza mediante la transmisión de un láser, de longitud de onda entre 530 y 532 nm, desde una altura aproximada de 200 m a una velocidad de 60 m / s en promedio. [9]
Ortoimagen de alta resolución [ editar ]
La ortoimagen de alta resolución (HRO) es el proceso de creación de una imagen que combina las cualidades geométricas con las características de las fotografías. El resultado de este proceso es una ortoimagen , una imagen a escala que incluye correcciones realizadas para el desplazamiento de características, como la inclinación del edificio. Estas correcciones se realizan mediante el uso de una ecuación matemática, información sobre la calibración del sensor y la aplicación de modelos digitales de elevación. [10]
Ejecución de HRO [ editar ]
Se puede crear una ortoimagen mediante la combinación de varias fotos del mismo objetivo. El objetivo se fotografía desde varios ángulos diferentes para permitir la percepción de la verdadera elevación e inclinación del objeto. Esto le da al espectador una percepción precisa del área objetivo. [10]
Uso en la cartografía del fondo marino [ editar ]
La ortoimagen de alta resolución se está utilizando actualmente en el "programa de cartografía terrestre", cuyo objetivo es "producir datos topográficos de alta resolución desde Oregón hasta México". La ortoimagen se utilizará para proporcionar los datos fotográficos de estas regiones. [11]
Proyecto Seabed 2030 [ editar ]
El Proyecto Nippon Foundation-GEBCO Seabed 2030, que tiene como objetivo motivar a varios colaboradores a crear un mapa completo del fondo oceánico, se lanzó en 2016. [12] Hay cuatro centros Seabed 2030, que coordinan las actividades cartográficas en diferentes regiones, recopilar y compilar la información batimétrica y asociarse con las actividades cartográficas existentes en sus regiones. El Centro Global Seabed 2030 es responsable de "producir y entregar productos GEBCO globales". [13]
GEBCO significa Carta Batimétrica General de los Océanos. Es el único organismo intergubernamental con el mandato de cartografiar todo el fondo del océano. Al comienzo del proyecto, solo el 6 por ciento del fondo oceánico del mundo había sido relevado según los estándares actuales; a junio de 2020 [actualizar], el proyecto había registrado un 19 por ciento mapeado. Aproximadamente 14,500,000 kilómetros cuadrados (5,600,000 millas cuadradas) de nuevos datos batimétricos se incluyeron en la cuadrícula GEBCO en 2019. Tecnología satelital, que utiliza altímetros que infieren la topografía del fondo marino a partir de la forma en que su gravedad afecta la superficie del océano sobre él, pero no da una resolución suficientemente alta. Seabed 2030 tiene como objetivo lograr una resolución de al menos 100 m en cada parte del fondo del océano. [12]
Los gobiernos, las instituciones y las empresas han estado contribuyendo al esfuerzo, y Seabed 2030 está obteniendo información de cualquier parte que pueda contribuir, incluidas las embarcaciones pequeñas. El British Antarctic Survey está ayudando al esfuerzo variando las rutas de sus barcos para mapear diferentes partes del fondo marino. [12]
Ver también [ editar ]
- Clasificación acústica del fondo marino
- Morfodinámica costera
Referencias [ editar ]
- ^ Jones, EJW (1999). Geofísica marina . Nueva York: Wiley.
- ↑ a b Wölfl, Anne-Cathrin; Snaith, Helen; Amirebrahimi, Sam; Devey, Colin W .; Dorschel, Boris; Ferrini, Vicki; Huvenne, Veerle AI; Jakobsson, Martin; Jencks, Jennifer; Johnston, Gordon; Lamarche, Geoffroy; Mayer, Larry; Millar, David; Pedersen, Terje Haga; Picard, Kim; Reitz, Anja; Schmitt, Thierry; Visbeck, Martin; Weatherall, Pauline; Wigley, Rochelle (2019). "Cartografía del fondo marino: el desafío de una batimetría oceánica verdaderamente global" . Fronteras de las ciencias marinas . 6 : 283. doi : 10.3389 / fmars.2019.00283 . ISSN 2296-7745 .
- ^ Charles W. Finkl, 2016, Mapeo del fondo marino a lo largo de los estantes continentales: investigación y técnicas para visualizar entornos bentónicos. Edición de recursos de Internet. Volumen 13. Página (s) 3 - 53
- ^ a b c d e Charles W. Finkl, ed., 2016, Mapeo del fondo marino a lo largo de los estantes continentales: investigación y técnicas para visualizar entornos bentónicos. Edición de recursos de Internet. Volumen 13. Página (s) 31 - 35
- ^ a b Administración Nacional Oceánica y Atmosférica (NOAA) (15 de abril de 2020). "¿Qué es LIDAR?" . Servicio Oceánico Nacional de NOAA . Consultado el 21 de junio de 2020 .
- ^ Brock y Purkis (2009) El papel emergente de la teledetección Lidar en la investigación costera y la gestión de recursos. En: Brock J, Purkis S (eds) Aplicaciones costeras de lidar aerotransportado. J Coastal Res, Número especial No. 53: Página (s) 1–5
- ^ Bukata y col. (1995) Propiedades ópticas y teledetección de aguas interiores y costeras. CRC Press, Boca Raton, páginas 365
- ^ Deronde y col. (2008) Monitoreo de la dinámica de los sedimentos a lo largo de una costa arenosa por medio de sensores remotos hiperespectrales aéreos y LIDAR: un estudio de caso en Bélgica. Earth Surf Process 33: Página (s) 280–294
- ^ Charles W. Finkl, ed., 2016, Mapeo del fondo marino a lo largo de los estantes continentales: investigación y técnicas para visualizar entornos bentónicos. Edición de recursos de Internet. Volumen 13. Página 23
- ^ a b USGS, fecha de última edición 2015, ortoimagen de alta resolución (HRO) , https://lta.cr.usgs.gov/high_res_ortho
- ^ Consejo de protección oceánica del estado de California, 2009, Mapeo de los recursos de California , http://www.opc.ca.gov/2009/12/mapping/
- ↑ a b c Amos, Jonathan (21 de junio de 2020). "Una quinta parte del suelo oceánico de la Tierra está ahora cartografiada" . BBC News . Consultado el 21 de junio de 2020 .
- ^ "Centros de datos para el proyecto Nippon Foundation-GEBCO Seabed 2030" . Proyecto Nippon Foundation-GEBCO Seabed 2030 . GEBCO . Consultado el 21 de junio de 2020 .
Enlaces externos [ editar ]
- Explorador oceánico de la NOAA
- Schmidt Ocean Institute: mapeo del fondo marino
- Seafloormapping.co.uk
- Fondo marino 2030