Sistema de prevención de colisiones
Un sistema para evitar colisiones ( CAS ), también conocido como sistema previo al choque, sistema de advertencia de colisión frontal o sistema de mitigación de colisiones , es un sistema avanzado de asistencia al conductor diseñado para prevenir o reducir la gravedad de una colisión. [2] En su forma básica, un sistema de advertencia de colisión frontal monitorea la velocidad de un vehículo, la velocidad del vehículo que tiene delante y la distancia entre los vehículos, para que pueda advertir al conductor si los vehículos se acercan demasiado. cerca, lo que podría ayudar a evitar un choque. [3] Varias tecnologías y sensores que se utilizan incluyen radar (para todo clima) y, a veces,láser ( LIDAR ) y cámaras (que emplean reconocimiento de imágenes ) para detectar un choque inminente. Los sensores GPS pueden detectar peligros fijos, como acercarse a las señales de alto a través de una base de datos de ubicación. [2] [4] [5] [6] La detección de peatones también puede ser una característica de este tipo de sistemas.
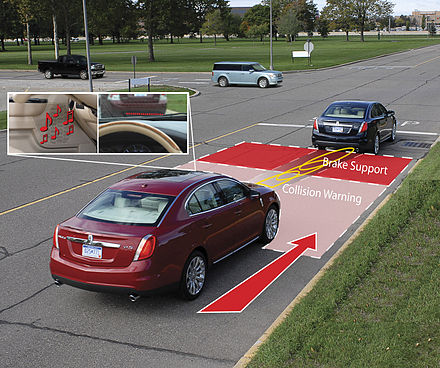
Los sistemas de prevención de colisiones van desde sistemas generalizados obligatorios en algunos países, como el frenado de emergencia autónomo ( AEB ) en la UE, acuerdos entre fabricantes de automóviles y funcionarios de seguridad para hacer que los sistemas de prevención de colisiones sean eventualmente estándar, como en los Estados Unidos, [7] hasta proyectos de investigación que incluyen algunos dispositivos específicos del fabricante. Para obtener información completa sobre el sistema de prevención de colisiones, puede buscar, número de patente 4926171 Mayo de 1990 Dispositivo de predicción y prevención de colisiones para vehículos en movimiento (Atonumas) Inventor William L Kelley nacido el 19 de enero de 1941
El sistema de frenado de emergencia avanzado ( AEBS ) (también frenado de emergencia automatizado en algunas jurisdicciones) se define en el reglamento 131 de la CEPE de la ONU como: un sistema que puede detectar automáticamente una posible colisión frontal y activar el sistema de frenado del vehículo para desacelerar el vehículo con el fin de evitar o mitigar una colisión. [8] El reglamento 152 de la CEPE de la ONU dice que la desaceleración puede ser de 5 metros por segundo al cuadrado. [9]
Una vez que se detecta una colisión inminente, estos sistemas proporcionan una advertencia al conductor. Cuando la colisión se vuelve inminente, pueden actuar de forma autónoma sin intervención del conductor (frenando, girando o ambos). La prevención de colisiones mediante el frenado es adecuada a velocidades bajas del vehículo (por ejemplo, por debajo de 50 km/h (31 mph)), mientras que la prevención de colisiones mediante la dirección puede ser más adecuada a velocidades más altas del vehículo si los carriles están despejados. [10] Los automóviles con prevención de colisiones también pueden estar equipados con control de crucero adaptativo , utilizando los mismos sensores orientados hacia adelante.
AEB difiere de la advertencia de colisión frontal: FCW alerta al conductor con una advertencia pero no frena el vehículo por sí solo. [11]
El tiempo hasta la colisión podría ser una forma de elegir qué método de evitación (frenado o dirección) es el más apropiado. [13]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}