Vehículo submarino autónomo
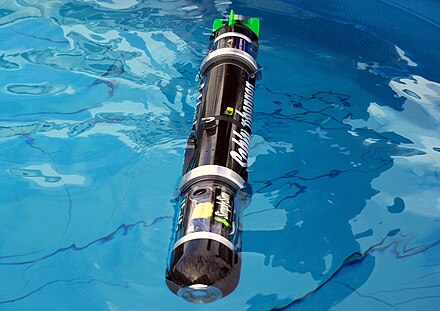
Un vehículo submarino autónomo ( AUV ) es un robot que viaja bajo el agua sin requerir la intervención de un operador. Los AUV constituyen parte de un grupo más grande de sistemas submarinos conocidos como vehículos submarinos no tripulados , una clasificación que incluye vehículos submarinos operados remotamente (ROV) no autónomos, controlados y alimentados desde la superficie por un operador/piloto a través de un umbilical o mediante control remoto. En aplicaciones militares, un AUV se conoce más a menudo como un vehículo submarino no tripulado ( UUV ). Los planeadores submarinos son una subclase de AUV.
El primer AUV fue desarrollado en el Laboratorio de Física Aplicada de la Universidad de Washington ya en 1957 por Stan Murphy, Bob Francois y más tarde, Terry Ewart. El "Vehículo de investigación submarina de propósito especial", o SPURV , se utilizó para estudiar la difusión, la transmisión acústica y las estelas submarinas.
Otros AUV tempranos se desarrollaron en el Instituto de Tecnología de Massachusetts en la década de 1970. Uno de ellos se encuentra en exhibición en la Hart Nautical Gallery del MIT. Al mismo tiempo, los AUV también se desarrollaron en la Unión Soviética [1] (aunque esto no se supo comúnmente hasta mucho más tarde).
Este tipo de vehículos submarinos se ha convertido recientemente en una atractiva alternativa para la búsqueda y exploración submarina ya que son más económicos que los vehículos tripulados. En los últimos años, ha habido abundantes intentos de desarrollar vehículos submarinos para enfrentar el desafío de los programas de exploración y extracción en los océanos. Recientemente, los investigadores se han centrado en el desarrollo de AUV para la recopilación de datos a largo plazo en oceanografía y gestión costera. [2]
La industria del petróleo y el gas utiliza AUV para hacer mapas detallados del lecho marino antes de comenzar a construir infraestructura submarina; Las tuberías y las terminaciones submarinas se pueden instalar de la manera más rentable con la mínima alteración del medio ambiente. El AUV permite a las empresas topográficas realizar levantamientos precisos de áreas donde los levantamientos batimétricos tradicionales serían menos efectivos o demasiado costosos. Además, ahora es posible realizar estudios de tuberías posteriores al tendido, lo que incluye la inspección de tuberías. El uso de AUV para la inspección de tuberías y la inspección de estructuras submarinas hechas por el hombre es cada vez más común.
Los científicos usan AUV para estudiar los lagos, el océano y el fondo del océano. Se puede colocar una variedad de sensores en los AUV para medir la concentración de varios elementos o compuestos, la absorción o reflexión de la luz y la presencia de vida microscópica. Los ejemplos incluyen sensores de conductividad-temperatura-profundidad (CTD), fluorómetros y sensores de pH . Además, los AUV se pueden configurar como vehículos de remolque para entregar paquetes de sensores personalizados a ubicaciones específicas.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}