Atraque y atraque de naves espaciales
{kind=link}
El atraque y el atraque de naves espaciales es la unión de dos vehículos espaciales . Esta conexión puede ser temporal o parcialmente permanente , como para los módulos de la estación espacial.
El acoplamiento se refiere específicamente a la unión de dos vehículos espaciales de vuelo libre separados. [1] [2] [3] [4] El atraque se refiere a las operaciones de acoplamiento en las que un módulo / vehículo pasivo se coloca en la interfaz de acoplamiento de otro vehículo espacial mediante el uso de un brazo robótico . [1] [3] [4] Debido a que el proceso moderno de desamarre requiere más trabajo de la tripulación y consume mucho tiempo, las operaciones de atraque no son adecuadas para evacuaciones rápidas de la tripulación en caso de una emergencia. [5] [ se necesita cita completa ]
Historia
Unión cósmica
Esta sección necesita citas adicionales para su verificación . ( Octubre de 2018 ) |
{kind=link}

La capacidad de acoplamiento de las naves espaciales depende del encuentro espacial , la capacidad de dos naves espaciales para encontrarse y mantenerse en la misma órbita . Esto fue desarrollado por primera vez por los Estados Unidos para el Proyecto Gemini . Se planeó que la tripulación del Gemini 6 se encontrara y atracara manualmente bajo el mando de Wally Schirra , con un Agena Target Vehicle sin tripulación en octubre de 1965, pero el vehículo Agena explotó durante el lanzamiento. En la misión revisada Gemini 6A, Schirra realizó con éxito una cita en diciembre de 1965 con el Gemini 7 tripulado., acercándose a menos de 0,3 metros (1 pie), pero no había capacidad de acoplamiento entre dos naves espaciales Gemini. El primer acoplamiento con un Agena se realizó con éxito bajo el mando de Neil Armstrong en Gemini 8 el 16 de marzo de 1966. Se realizaron acoplamientos manuales en tres misiones posteriores de Gemini en 1966.
El programa Apolo dependía del encuentro de la órbita lunar para lograr su objetivo de llevar hombres a la Luna. Esto requirió primero una maniobra de transposición, acoplamiento y extracción entre la nave espacial madre del módulo de comando y servicio (CSM) de Apolo y el módulo lunar.(LM) aterrizaje de una nave espacial, poco después de que ambas naves fueran enviadas fuera de la órbita terrestre en un camino hacia la Luna. Luego, después de completar la misión de aterrizaje lunar, dos astronautas en el LM tuvieron que reunirse y atracar con el CSM en órbita lunar, para poder regresar a la Tierra. La nave espacial fue diseñada para permitir la transferencia de la tripulación dentro de un vehículo a través de un túnel entre la nariz del Módulo de Comando y el techo del Módulo Lunar. Estas maniobras se demostraron por primera vez en la órbita terrestre baja el 7 de marzo de 1969, en el Apolo 9 , luego en la órbita lunar en mayo de 1969 en el Apolo 10 , luego en seis misiones de aterrizaje lunar, así como en el Apolo 13, donde se utilizó el LM como un vehículo de rescate en lugar de realizar un aterrizaje lunar.
A diferencia de los Estados Unidos, que utilizó el acoplamiento piloto manual en todos los programas Apollo, Skylab y Space Shuttle , la Unión Soviética empleó sistemas de acoplamiento automatizados desde el comienzo de sus intentos de acoplamiento. El primer sistema de este tipo, Igla , se probó con éxito el 30 de octubre de 1967 cuando los dos vehículos de prueba Soyuz sin tripulación , Kosmos 186 y Kosmos 188, se acoplaron automáticamente en órbita. [6] [7] Este fue el primer atraque soviético exitoso. Procediendo a los intentos de atraque con tripulación, la Unión Soviética logró por primera vez el encuentro de Soyuz 3 con el Soyuz 2 sin tripulación.embarcación el 25 de octubre de 1968; el acoplamiento se intentó sin éxito. El primer atraque soviético tripulado se logró el 16 de enero de 1969, entre Soyuz 4 y Soyuz 5 . Esta primera versión de la nave espacial Soyuz no tenía un túnel de transferencia interno, pero dos cosmonautas realizaron una transferencia extravehicular de Soyuz 5 a Soyuz 4, aterrizando en una nave espacial diferente a la que habían lanzado.
En la década de 1970, la Unión Soviética mejoró la nave espacial Soyuz para agregar un túnel de transferencia interno y lo usó para transportar cosmonautas durante el programa de la estación espacial Salyut con la primera visita exitosa a la estación espacial a partir del 7 de junio de 1971, cuando la Soyuz 11 atracó en Salyut 1 . Estados Unidos hizo lo mismo, acoplando su nave espacial Apollo a la estación espacial Skylab en mayo de 1973. En julio de 1975, las dos naciones cooperaron en el Proyecto de prueba Apollo-Soyuz , acoplando una nave espacial Apollo con una Soyuz utilizando un módulo de acoplamiento especialmente diseñado para acomodarlo. los diferentes sistemas de atraque y atmósferas de las naves espaciales.
A partir de Salyut 6 en 1978, la Unión Soviética comenzó a utilizar la nave espacial de carga Progress sin tripulación para reabastecer sus estaciones espaciales en órbita terrestre baja, extendiendo en gran medida la duración de las estancias de la tripulación. Como nave espacial sin tripulación, Progress se reunió y se acopló a las estaciones espaciales de forma totalmente automática. En 1986, el sistema de acoplamiento Igla fue reemplazado por el sistema Kurs actualizado en la nave espacial Soyuz. La nave espacial Progress recibió la misma actualización varios años después. [6] : 7 El sistema Kurs todavía se utiliza para acoplarse al Segmento Orbital Ruso de la Estación Espacial Internacional .
Atraque
El atraque de naves espaciales se puede rastrear al menos desde el atraque de cargas útiles en la bahía de carga útil del Transbordador Espacial. [8] Dichas cargas útiles podrían ser naves espaciales en vuelo libre capturadas para mantenimiento / devolución, o cargas útiles expuestas temporalmente al entorno espacial al final del Sistema de manipulación remota . Se utilizaron varios mecanismos de atraque diferentes durante la era del transbordador espacial. Algunos de ellos eran características de la bahía de carga útil (por ejemplo, el conjunto de cierre de retención de carga útil), mientras que otros eran equipos de apoyo aerotransportados (por ejemplo, la estructura de apoyo de vuelo utilizada para las misiones de servicio del HST ).
Hardware
Androginia
| Busque andrógino en Wikcionario, el diccionario gratuito. |
Los sistemas de atraque / atraque pueden ser andróginos (sin género ) o no andróginos (con género ), lo que indica qué partes del sistema pueden aparearse entre sí.
Los primeros sistemas para la unión de naves espaciales eran todos diseños de sistemas de acoplamiento no andróginos. Los diseños no andróginos son una forma de apareamiento de género [2] donde cada nave espacial que se unirá tiene un diseño único (masculino o femenino) y un papel específico que desempeñar en el proceso de acoplamiento. Los roles no se pueden invertir. Además, dos naves espaciales del mismo género no se pueden unir en absoluto.
El atraque andrógino (y más tarde el atraque andrógino), por el contrario, tiene una interfaz idéntica en ambas naves espaciales. En una interfaz andrógina, hay un diseño único que puede conectarse a un duplicado de sí mismo. Esto permite la redundancia a nivel del sistema (inversión de roles), así como el rescate y la colaboración entre dos naves espaciales. También proporciona un diseño de misión más flexible y reduce el análisis y la formación de misiones únicos. [2]
Lista de mecanismos / sistemas
| Imagen | Nombre | Método | Transferencia de tripulación interna | Notas | Escribe |
|---|---|---|---|---|---|
| Mecanismo de acoplamiento Géminis | Unión cósmica | No | Permitió que la nave espacial Gemini (activa) se acoplara al vehículo objetivo Agena (pasiva). | No andrógino | |
| Mecanismo de acoplamiento Apollo | Unión cósmica | sí | Permitió que el Módulo de Comando / Servicio (activo) se acoplara al Módulo Lunar Apollo [9] (pasivo) y la estación espacial Skylab (pasivo). Se utilizó para acoplarse al adaptador del módulo de acoplamiento (pasivo) durante el Proyecto de prueba Apollo-Soyuz (ASTP), que permitió a la tripulación acoplarse con una nave espacial soviética Soyuz 7K-TM . Tenía un diámetro de paso circular de 810 mm (32 pulgadas). [10] [11] | No andrógino | |
| Sonda rusa original y sistema de acoplamiento drogue | Unión cósmica | No | El sistema de acoplamiento de sonda y drogue Soyuz original se utilizó con la nave espacial Soyuz 7K-OK de primera generación desde 1966 hasta 1970 para recopilar datos de ingeniería como preparación para el programa de la estación espacial soviética. Los datos recopilados se utilizaron posteriormente para la conversión de la nave espacial Soyuz, que inicialmente se desarrolló para el programa lunar tripulado soviético , en una nave de transporte de la estación espacial. [1] El 30 de octubre de 1967 se realizó un primer acoplamiento con dos naves espaciales Soyuz sin tripulación, el primer acoplamiento espacial totalmente automatizado en la historia de los vuelos espaciales, con las misiones Kosmos 186 y Kosmos 188 . | No andrógino | |
| Sistema de acoplamiento Kontakt | Unión cósmica | No | Diseñado para ser utilizado en el programa lunar tripulado soviético para permitir que la Soyuz 7K-LOK ("Lunar Orbital Craft", activo) se acople al módulo de aterrizaje lunar LK (pasivo). [12] | No andrógino | |
| SSVP-G4000 | Unión cósmica | sí | SSVP-G4000 también se conoce más vagamente como la sonda rusa y el drogue o simplemente el sistema de acoplamiento ruso (RDS). [1] [13] En ruso, SSVP significa Sistema Stykovki i Vnutrennego Perekhoda , literalmente "Sistema de acoplamiento y transferencia interna". [14] Se utilizó para el primer acoplamiento a una estación espacial en la historia de los vuelos espaciales, con las misiones Soyuz 10 y Soyuz 11 que se acoplaron a la estación espacial soviética Salyut 1 en 1971. [1] [13] El sistema de acoplamiento se actualizó en mediados de la década de 1980 para permitir el acoplamiento de módulos de 20 toneladas a la estación espacial Mir . [14] Tiene un paso de transferencia circular que tiene un diámetro de 800 mm (31 pulgadas) y es fabricado por RKK Energiya. [3] [4] [14] El sistema de sonda y drogue permite visitar las naves espaciales que utilizan la interfaz de acoplamiento de la sonda, como Soyuz , Progress y la nave espacial ATV de la ESA , para acoplarse a estaciones espaciales que ofrecen un puerto con una interfaz de drogue, como el antiguo Salyut y Mir o la ISS actual. estación Espacial. Hay un total de cuatro puertos de acoplamiento de este tipo disponibles en el segmento orbital ruso de la ISS para las naves espaciales visitantes; Estos se encuentran en los módulos Zvezda, Rassvet, Pirs y Poisk. [14] Además, el sistema de sonda y drogue se utilizó en la ISS para acoplar Rassvet de forma semipermanente a Zarya. [1] | No andrógino | |
| APAS-75 | Unión cósmica | sí | Se utiliza en el módulo de acoplamiento del proyecto de prueba Apollo-Soyuz y Soyuz 7K-TM . Hubo variaciones en el diseño entre la versión estadounidense y la soviética, pero aún eran mecánicamente compatibles. | Andrógino | |
| APAS-89 | Unión cósmica | sí | Usado en Mir ( Kristall , [12] [15] Módulo de acoplamiento Mir ), Soyuz TM-16 , [12] [15] Buran (fue planeado). [15] Tenía un paso de transferencia circular con un diámetro de 800 mm (31 pulgadas). [1] [3] [4] | Andrógino (Soyuz TM-16), no andrógino (Kristall, [16] Módulo de acoplamiento Mir [17] ) | |
| APAS-95 | Unión cósmica | sí | Se usó para acoplamientos de transbordadores espaciales a Mir e ISS, [15] En la ISS, también se usó en el módulo Zarya, segmento orbital ruso para interactuar con PMA-1 en el módulo Unity, segmento orbital estadounidense [18] Tiene un diámetro de 800 mm (31 pulg). [1] [3] [4] Descrito como "esencialmente lo mismo que" APAS-89. [15] | Andrógino (Shuttle, Zarya [ cita requerida ] y PMA-1 [1] ), No andrógino (PMA-2 y PMA-3) [1] | |
| SSVP-M8000 ( sistema de acoplamiento híbrido ) | Unión cósmica | sí | SSVP-M8000 o más comúnmente conocido como "híbrido", es una combinación de un mecanismo de muelle suave de "sonda y embudo" con un collar de muelle rígido APAS-95. [14] Comenzó a fabricarse en 1996. [14] Es fabricado por RKK Energiya. [14] Utilizado en ISS (conecta Zvezda con Zarya , Pirs , Poisk [1] y Nauka [19] ) | No andrógino | |
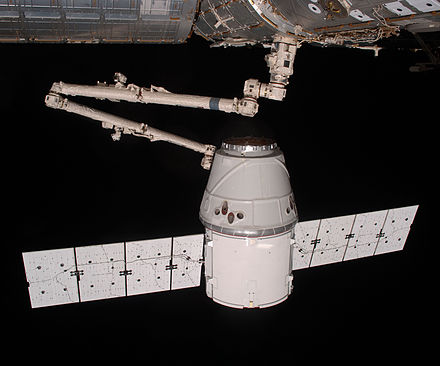
| Mecanismo de atraque común | Atraque | sí | Utilizado en ISS ( USOS ), MPLM , HTV , Dragon Cargo , [20] Cygnus . El CBM estándar tiene un paso en forma de cuadrado con bordes redondeados y tiene un ancho de 1300 mm (50 pulgadas). [4] La trampilla más pequeña que usa Cygnus da como resultado un paso de transferencia de la misma forma pero tiene un ancho de 940 mm (37 pulgadas). [21] | No andrógino | |
| Mecanismo de acoplamiento chino | Unión cósmica | sí | Utilizado por la nave espacial Shenzhou , comenzando con Shenzhou 8, para acoplarse a las estaciones espaciales chinas. El mecanismo de acoplamiento chino se basa en el sistema ruso APAS-89 / APAS-95; algunos lo han llamado un "clon". [1] Ha habido informes contradictorios de los chinos sobre su compatibilidad con APAS-89/95. [22] Tiene un paso de transferencia circular que tiene un diámetro de 800 mm (31 pulgadas). [23] [24] La variante andrógina tiene una masa de 310 kg y la variante no andrógina tiene una masa de 200 kg. [25] Se utiliza por primera vez en la estación espacial Tiangong 1 y se utilizará en futuras estaciones espaciales chinas y con futuros vehículos de reabastecimiento de carga chinos. | Andrógino (Shenzhou) No andrógino (Tiangong-1) | |
| Sistema de acoplamiento de la NASA | Atraque o atraque | sí | Se utiliza en el adaptador de acoplamiento internacional ISS , el SpaceX Dragon 2 y otros futuros vehículos estadounidenses. Cumple con el estándar internacional del sistema de acoplamiento . Tiene un paso de transferencia circular que tiene un diámetro de 800 mm (31 in). [26] | Andrógino ( vehículo de tripulación comercial , Orion) No andrógino ( IDA ) | |
| Mecanismo de atraque y atraque internacional | Atraque o atraque | sí | Se prevé que el sistema de apareamiento europeo sea capaz de atracar y atracar naves espaciales grandes y pequeñas. El IBDM está diseñado para ser compatible con la Docking Internacional Sistema estándar [26] (IDSS) y es por lo tanto compatible con el futuro ISS Internacional Docking Adapter (IDA) en el lado estadounidense de la ISS . [27] Tiene un paso de transferencia circular que tiene un diámetro de 800 mm (31 pulgadas). [26] La empresa estadounidense Sierra Nevada Corporation (SNC) está desarrollando el Dream Chaser , que es una pequeña nave espacial reutilizable que es candidata para transportar astronautas y / o tripulación a la ISS . La Agencia Espacial Europea ha iniciado una cooperación con SNC para proporcionar potencialmente el IBDM para conectar este nuevo vehículo a la ISS en el futuro. [28] | Andrógino |
Adaptadores
Un adaptador de atraque o atraque es un dispositivo mecánico o electromecánico que facilita la conexión de un tipo de interfaz de atraque o atraque a una interfaz diferente. Si bien, en teoría, estas interfaces pueden ser de acoplamiento / atraque, atraque / atraque o atraque / atraque, hasta la fecha solo los dos primeros tipos se han implementado en el espacio. A continuación se enumeran los adaptadores lanzados anteriormente y que se planea lanzar:
- Módulo de acoplamiento ASTP: un módulo de esclusa de aire que convirtió US Probe y Drogue en APAS-75 . Construido por Rockwell International para la misión del Proyecto de prueba Apollo-Soyuz de 1975 . [29]
- Adaptador de acoplamiento presurizado (PMA) : convierte un mecanismo de atraque común activo en APAS-95 . Tres PMA se adjuntan a la ISS , PMA-1 y PMA-2 se lanzaron en 1998 en STS-88 , PMA-3 a finales de 2000 en STS-92 . PMA-1 se utiliza para conectar el módulo de control Zarya con el nodo 1 de Unity, los transbordadores espaciales utilizaron PMA-2 y PMA-3 para el acoplamiento.
- Adaptador de acoplamiento internacional (IDA) : [30] Convierte APAS-95 en el estándar del sistema de acoplamiento internacional. Se planeó que IDA-1 se lanzara en SpaceX CRS-7 hasta su falla de lanzamiento, y se adjuntara al PMA avanzado del Nodo-2. [30] [31] IDA-2 se lanzó en SpaceX CRS-9 y se adjuntó al PMA avanzado del Nodo-2. [30] [31] IDA-3, el reemplazo de IDA-1 lanzado en SpaceX CRS-18 y adjunto al zenith PMA de Node-2. [32] El adaptador es compatible con el Estándar Internacional del Sistema de Acoplamiento (IDSS), que es un intento de la Junta de Coordinación Multilateral de la ISS para crear un estándar de acoplamiento. [33]
Módulo de acoplamiento ASTP
Adaptador de acoplamiento presurizado
Adaptador de acoplamiento internacional
Acoplamiento de naves espaciales sin tripulación
Durante los primeros cincuenta años de vuelo espacial, el principal objetivo de la mayoría de conexión y que estén atracados misiones era tripulación de transferencia, constructo o reabastecimiento una estación espacial, o a prueba para una misión de este tipo (por ejemplo, el acoplamiento entre Kosmos 186 y Kosmos 188 ). Por lo tanto, comúnmente al menos una de las naves espaciales participantes estaba tripulada, con un volumen habitable presurizado (por ejemplo, una estación espacial o un módulo de aterrizaje lunar) como objetivo; las excepciones fueron algunas misiones de atraque soviéticas sin tripulación (por ejemplo, los atraques de Kosmos 1443 y Progress 23 a un Salyut 7 sin tripulación o Progress M1-5 a un Mir sin tripulación ). Otra excepción fueron algunas misiones de los transbordadores espaciales estadounidenses tripulados., como atraques del Telescopio Espacial Hubble (HST) durante las cinco misiones de servicio del HST.
Los cambios en el aspecto tripulado comenzaron en 2015, cuando se planificaron una serie de atraques comerciales de naves espaciales sin tripulación impulsados económicamente. En 2011, dos proveedores de naves espaciales comerciales [ ¿cuál? ] anunció planes para proporcionar naves espaciales de reabastecimiento autónomas / teleoperadas sin tripulación para dar servicio a otras naves espaciales sin tripulación. En particular, ambas naves espaciales de servicio tenían la intención de acoplarse con satélites que no estaban diseñados para el acoplamiento ni para el servicio en el espacio.
El modelo de negocio inicial para estos servicios se encontraba principalmente en una órbita casi geosincrónica , aunque también se previeron grandes servicios de maniobra orbital delta-v . [34]
Partiendo de la misión Orbital Express de 2007 , una misión patrocinada por el gobierno de EE. UU. Para probar el servicio de satélites en el espacio con dos vehículos diseñados desde cero para reabastecimiento de combustible en órbita y reemplazo de subsistemas, dos compañías anunciaron planes para misiones de servicio de satélites comerciales que requieren el atraque de dos vehículos sin tripulación.
- El Servicio de Infraestructura Espacial (SIS) es una nave espacial que estaba siendo desarrollada por la firma aeroespacial canadiense MacDonald, Dettwiler and Associates (MDA), fabricante de Canadarm, para operar como un depósito de reabastecimiento en el espacio a pequeña escala para satélites de comunicaciones en órbita geosincrónica . Intelsat fue un socio de requisitos y financiación para el satélite de demostración inicial, previsto para su lanzamiento en 2015. [35] [36]
- Mission Extension Vehicle (MEV) [37] fue una nave espacial desarrollada en 2011 por la firma estadounidense ViviSat , una empresa conjunta 50/50 de las firmas aeroespaciales US Space y ATK , para operar como una nave espacial de reabastecimiento de combustible de satélites en el espacio a pequeña escala. . [34] MEV atracaría pero no transferiría combustible. Más bien usaría " sus propios propulsores para proporcionar control de actitud para el objetivo". [34]
Cada uno de los vehículos SIS y MEV planeó utilizar una técnica de acoplamiento diferente. SIS planeó utilizar un accesorio de anillo alrededor del motor de retroceso [38] mientras que el Vehículo de Extensión de la Misión usaría un enfoque algo más estándar de insertar una sonda en la boquilla del motor de retroceso. [34]
Una nave espacial prominente que recibió un mecanismo para acoplamientos sin tripulación es el Telescopio Espacial Hubble (HST). En 2009, la misión del transbordador STS-125 agregó el mecanismo de captura suave (SCM) en el mamparo de popa del telescopio espacial. El SCM está diseñado para acoplamientos sin presión y se utilizará al final de la vida útil del Hubble para acoplar una nave espacial sin tripulación para desorbitar al Hubble. El SCM utilizado fue diseñado para ser compatible con la interfaz del Sistema de acoplamiento de la NASA (NDS) para reservar la posibilidad de una misión de servicio. [39] El SCM, en comparación con el sistema utilizado durante las cinco misiones de mantenimiento del HST para capturar y atracar el HST en el transbordador espacial, [ cita requerida ]Reducir significativamente las complejidades del diseño de captura y encuentro asociadas con tales misiones. El NDS tiene cierto parecido con el mecanismo APAS-95, pero no es compatible con él. [40]
Atraque no cooperativo
El acoplamiento con una nave espacial (u otro objeto espacial hecho por el hombre) que no tiene un sistema de control de actitud operable a veces puede ser deseable, ya sea para salvarlo o para iniciar una de-órbita controlada . Hasta ahora se han propuesto algunas técnicas teóricas para el acoplamiento con naves espaciales no cooperativas. [41] Sin embargo, con la única excepción de la misión Soyuz T-13 para rescatar la dañada estación espacial Salyut 7 , a partir de 2006 [actualizar], todos los acoplamientos de naves espaciales en los primeros cincuenta años de vuelo espacial se habían realizado con vehículos en los que ambas naves involucradas estaban bajo control de actitud pilotado, autónomo o telerobótico . [41]En 2007, sin embargo, se realizó una misión de demostración que incluyó una prueba inicial de una nave espacial no cooperativa capturada por una nave espacial controlada con el uso de un brazo robótico. [42] El trabajo de investigación y modelado continúa apoyando misiones de captura autónomas no cooperativas adicionales en los próximos años. [43] [44]
Misión de salvamento de la estación espacial Salyut 7
Salyut 7 , la décima estación espacial de cualquier tipo lanzada, y Soyuz T-13 se acoplaron en lo que el autor David SF Portree describe como "una de las hazañas más impresionantes de reparaciones en el espacio de la historia". [12] El seguimiento solar falló y debido a una falla de telemetría, la estación no informó la falla al control de la misión mientras volaba de forma autónoma. Una vez que la estación se quedó sin reservas de energía eléctrica, dejó de comunicarse abruptamente en febrero de 1985. La programación de la tripulación se interrumpió para permitir que el comandante militar ruso Vladimir Dzhanibekov [45] y el ingeniero de vuelo de ciencia técnica Viktor Savinykh [46] hicieran reparaciones de emergencia.
Todas las estaciones espaciales soviéticas y rusas estaban equipadas con sistemas automáticos de encuentro y acoplamiento, desde la primera estación espacial Salyut 1 usando el sistema IGLA, hasta el Segmento Orbital Ruso de la Estación Espacial Internacional usando el sistema Kurs . El equipo soyuz descubrió que la estación no estaba transmitiendo radar o telemetría para el encuentro, y después de la llegada y la inspección externa de la estación giratoria, el equipo juzgó la proximidad utilizando telémetros láser de mano.
Dzhanibekov pilotó su barco para interceptar el puerto de avanzada de Salyut 7, igualó la rotación de la estación y logró un acoplamiento suave con la estación. Después de lograr un muelle duro, confirmaron que el sistema eléctrico de la estación estaba muerto. Antes de abrir la escotilla, Dzhanibekov y Savinykh tomaron muestras del estado de la atmósfera de la estación y lo encontraron satisfactorio. Vestidos con ropa de invierno forrada de piel, entraron en la estación fría para realizar reparaciones. En una semana se volvieron a poner en funcionamiento suficientes sistemas para permitir que los barcos de carga robotizados atracaran en la estación. Pasaron casi dos meses antes de que se normalizaran las condiciones atmosféricas en la estación espacial. [12]
Acoplamientos sin tripulación de objetos espaciales no cooperativos
Los ejemplos y la perspectiva de este artículo se refieren principalmente a los Estados Unidos y no representan una visión mundial del tema . ( Marzo de 2016 ) |
Se han teorizado técnicas de captura y encuentro no cooperativas, y una misión se ha realizado con éxito con naves espaciales sin tripulación en órbita. [42]
Un enfoque típico para resolver este problema implica dos fases. Primero, se realizan cambios de actitud y orbitales a la nave espacial "perseguidora" hasta que tenga un movimiento relativo cero con la nave espacial "objetivo". En segundo lugar, comienzan las maniobras de acoplamiento que son similares al acoplamiento tradicional de naves espaciales cooperativas. Se asume una interfaz de acoplamiento estandarizada en cada nave espacial. [47]
La NASA ha identificado puntos de encuentro y acoplamiento automatizados y autónomos: la capacidad de dos naves espaciales para encontrarse y atracar "operando independientemente de los controladores humanos y sin otro respaldo, y que requiere tecnología] avances en sensores, software y posicionamiento en órbita en tiempo real. y control de vuelo , entre otros desafíos ", como tecnología crítica para el" éxito final de capacidades como el almacenamiento y reabastecimiento de combustible en órbita ", y también para operaciones complejas en el ensamblaje de componentes de misión para destinos interplanetarios. [48]
El vehículo de acoplamiento y encuentro automatizado / autónomo (ARDV) es una misión propuesta de demostración de tecnología insignia de la NASA (FTD), para vuelos desde 2014/2015. Un objetivo importante de la NASA en la misión propuesta es hacer avanzar la tecnología y demostrar el encuentro y el acoplamiento automatizados. Un elemento de la misión definido en el análisis de 2010 fue el desarrollo de un sensor de operaciones de proximidad láser que podría usarse para vehículos no cooperativos a distancias entre 1 metro (3 pies 3 pulgadas) y 3 kilómetros (2 millas). Los mecanismos de atraque no cooperativos se identificaron como elementos de misión críticos para el éxito de dichas misiones autónomas. [48]
La lucha y la conexión con objetos espaciales no cooperativos se identificó como un desafío técnico superior en la hoja de ruta de robótica, tele-robótica y sistemas autónomos de la NASA de 2010. [49]
Estados de atraque
Esta sección no cita ninguna fuente . ( Noviembre de 2020 ) |
Una conexión de atraque / atraque se conoce como "blanda" o "dura". Normalmente, una nave espacial inicia primero un acoplamiento suave haciendo contacto y enganchando su conector de acoplamiento con el del vehículo objetivo. Una vez que se asegura la conexión blanda, si ambas naves espaciales están presurizadas, pueden proceder a un muelle rígido donde los mecanismos de acoplamiento forman un sello hermético, lo que permite que las escotillas interiores se abran de manera segura para que la tripulación y la carga puedan ser transferidas.
Atraque de naves espaciales y módulos
El atraque y el desacoplamiento describen naves espaciales que utilizan un puerto de atraque, sin ayuda y por sus propios medios. El atraque tiene lugar cuando una nave espacial o un módulo sin alimentación no puede usar un puerto de atraque o requiere ayuda para usar uno. Esta asistencia puede provenir de una nave espacial, como cuando el transbordador espacial usó su brazo robótico para empujar los módulos de la ISS a sus literas permanentes. De manera similar, el módulo Poisk fue amarrado permanentemente a un puerto de acoplamiento después de que una nave espacial Progress modificada lo empujara a su lugar, que luego fue descartado. La nave espacial de reabastecimiento Cygnus que llega a la ISS no se conecta a un puerto de acoplamiento, en cambio, es arrastrado hacia un mecanismo de atraque por el brazo robótico de la estación y la estación luego cierra la conexión. El mecanismo de atraque se usa solo en el segmento estadounidense de la ISS, el segmento ruso de la ISS usa puertos de atraque para atraques permanentes.
Atraque en la superficie de Marte
El acoplamiento ha sido discutido por la NASA con respecto a un rover tripulado de Marte , como con el hábitat de Marte o la etapa de ascenso. [50] El vehículo de superficie marciano (y los hábitats de la superficie) tendrían una gran escotilla de atraque rectangular, de aproximadamente 2 por 1 metro (6,6 por 3,3 pies). [50] [ verificación fallida ]
Galería
Timelapse del desacoplamiento de una nave espacial Soyuz de la Estación Espacial Internacional
Referencias
- ^ a b c d e f g h i j k l John Cook; Valery Aksamentov; Thomas Hoffman; Wes Bruner (1 de enero de 2011). "Mecanismos de interfaz ISS y su herencia" (PDF) . Houston, Texas: Boeing . Consultado el 31 de marzo de 2015 .
El acoplamiento es cuando una nave espacial entrante se encuentra con otra nave espacial y vuela una trayectoria de colisión controlada de tal manera que alinea y conecta los mecanismos de interfaz. Los mecanismos de acoplamiento de la nave espacial suelen entrar en lo que se denomina captura suave, seguida de una fase de atenuación de la carga y luego en la posición de acoplamiento rígido que establece una conexión estructural hermética entre las naves espaciales. Atracar, por el contrario, es cuando una nave espacial entrante es agarrada por un brazo robótico y su mecanismo de interfaz se coloca muy cerca del mecanismo de interfaz estacionario. Luego, típicamente hay un proceso de captura, alineación aproximada y alineación fina y luego fijación estructural.
- ^ a b c "Estandarización de acoplamiento internacional" (PDF) . NASA. 2009-03-17. pag. 15 . Consultado el 4 de marzo de 2011 .
Acoplamiento: unión o unión de dos vehículos espaciales de vuelo libre separados
- ↑ a b c d e Fehse, Wigbert (2003). Encuentro automatizado y acoplamiento de naves espaciales . Cambridge, Reino Unido: Cambridge University Press. ISBN 978-0521824927.
- ^ a b c d e f "Sistema avanzado de atraque / atraque - Taller de sellos de la NASA" (PDF) . NASA. 2004-11-04. pag. 15. Archivado desde el original (PDF) el 22 de septiembre de 2011 . Consultado el 4 de marzo de 2011 .
El atraque se refiere a las operaciones de acoplamiento en las que se coloca un módulo / vehículo inactivo en la interfaz de acoplamiento mediante un sistema de manipulación remota RMS.
El atraque se refiere a las operaciones de apareamiento en las que un vehículo activo vuela hacia la interfaz de apareamiento por sus propios medios.
- ^ "EVA-30 concluye los últimos preparativos de la tripulación comercial de la ISS" . NASASpaceFlight.com . 25 de febrero de 2015.
- ^ a b "Parte 1 del patrimonio de hardware Mir: Soyuz" (PDF) . NASA. pag. 10. Archivado desde el original (PDF) el 26 de diciembre de 2017 . Consultado el 3 de octubre de 2018 .
- ^ "Historia" . Archivado desde el original el 24 de abril de 2008 . Consultado el 23 de junio de 2010 .
- ^ "Guía del usuario de la carga útil de la bahía de carga útil del programa del transbordador espacial NSTS 21492 (básico)" .(Centro Espacial Lyndon B. Johnson, Houston Texas, 2000)
- ^ Historia de los sistemas de acoplamiento de EE. UU. (05/10/2010) Archivado el 24 de mayo de 2011 en Wayback Machine
- ^ "Kit de prensa de Apolo 9" (PDF) . NASA. 23 de febrero de 1969. pág. 43 . Consultado el 17 de marzo de 2015 .
El túnel tiene un diámetro de 32 pulgadas (.81 cm) y se utiliza para la transferencia de la tripulación entre el CSM y el LM por parte de los tripulantes en unidades de movilidad extravehicular (EMU) presurizadas o no presurizadas.
- ^ Harland, David (2011). Apolo 12 - En el océano de las tormentas: En el océano de las tormentas . Nueva York: Springer. pag. 138.
- ↑ a b c d e Portree, David (marzo de 1995). "Herencia de hardware Mir" (PDF) . NASA. Archivado desde el original (PDF) el 3 de agosto de 2009 . Consultado el 11 de diciembre de 2011 .
- ^ a b M. Cislaghi; C.Santini (octubre de 2008). "El sistema de acoplamiento ruso y el vehículo de transferencia automatizado: un concepto integrado seguro" (PDF) . ESA. Archivado desde el original el 3 de febrero de 2013 . Consultado el 14 de mayo de 2016 . CS1 maint: URL no apta ( enlace )
- ^ a b c d e f g "Sistemas de acoplamiento" . RussianSpaceWeb.com . Consultado el 2 de septiembre de 2012 .
- ^ a b c d e Bart Hendrickx; Bert Vis (2007). Energiya-Buran: el transbordador espacial soviético . Chichester, Reino Unido: Praxis Publishing Ltd. págs. 379–381. ISBN 978-0-387-69848-9.
Para las misiones de la estación espacial, Buran habría llevado un módulo de acoplamiento (SM) en la parte delantera de la bahía de carga útil. Consistía en una sección esférica (2,55 m de diámetro) rematada por un túnel cilíndrico (2,2 m de diámetro) con un puerto de atraque andrógino APAS-89, una versión modificada del sistema APAS-75 desarrollado por NPO Energiya para el Apolo de 1975. Proyecto de prueba Soyuz (página 141). El plan era que el orbitador fuera lanzado sin tripulación y volara a la estación espacial Mir, donde se acoplaría con el puerto de acoplamiento axial APAS-89 del módulo Kristall (página 246). A finales de la década de 1980, se ordenó a NPO Energiya que construyera tres naves espaciales Soyuz (números de serie 101, 102, 103) con puertos de acoplamiento APAS-89 (página 246). Artesanía Soyuz nr. 101 finalmente se lanzó como Soyuz TM-16 en enero de 1993,llevando a otra tripulación residente (Gennadiy Manakov y Aleksandr Poleshchuk) a la estación espacial Mir. Equipado con un puerto de acoplamiento APAS-89, fue el único vehículo Soyuz que se acopló con el módulo Kristall. Vehículo de "rescate" Soyuz nr. 102 y 103, que solo se habían ensamblado parcialmente, se modificaron como naves espaciales Soyuz TM ordinarias con mecanismos estándar de acoplamiento de sondas y se les asignaron nuevos números de serie (página 249). En julio de 1992, la NASA inició el desarrollo del Orbiter Docking System (ODS) para apoyar los vuelos de Shuttle a Mir. Montado en el extremo delantero de la bahía de carga útil, el ODS consta de una esclusa de aire externa, una estructura de celosía de soporte y un puerto de acoplamiento APAS. Mientras que los dos primeros elementos fueron construidos por Rockwell, el APAS fue fabricado por RKK Energiya. Aunque Energiya 'El designador interno del Shuttle APAS es APAS-95, es esencialmente el mismo que el APAS-89 de Buran. Mientras que el ODS se modificó ligeramente para las misiones de lanzadera a la ISS, APAS se mantuvo sin cambios (página 380).
- ^ "Módulo Kristall (77KST)" . www.russianspaceweb.com .
- ^ "Kit de prensa de la misión del transbordador espacial STS-74" (PDF) . NASA . Consultado el 28 de diciembre de 2011 .
Atlantis llevará el módulo de acoplamiento construido en Rusia, que tiene mecanismos de acoplamiento andróginos para múltiples misiones en la parte superior e inferior.
- ^ NASA.gov
- ^ Harding, Pete (29 de julio de 2021). "MLM Nauka se acopla a la ISS, funciona mal poco después" . NASASpaceFlight . Consultado el 30 de julio de 2021 .
- ^ Las pruebas de los nuevos sistemas Dragon comenzarán minutos después del lanzamiento , Stephen Clark, Spaceflight Now, <tcxspan tcxhref = "20120521" title = "Llame al <tcxspan tcxhref =" 20120521 "title =" Llame al <tcxspan tcxhref = "20120521" title = "Llame al 21 de mayo de 2012, a través de 3CX"> 21 de mayo de 2012, </tcxspan> a través de 3CX "> <tcxspan tcxhref =" 20120521 "title =" Llame al 21 de mayo de 2012, a través de 3CX "> 21 de mayo de 2012, </tcxspan> </tcxspan> a través de 3CX"> <tcxspan tcxhref = "20120521" title = "Llame a <tcxspan tcxhref =" 20120521 "title =" Llame al 21 de mayo de 2012, a través de 3CX "> 21 de mayo de 2012, </tcxspan> a través de 3CX"> <tcxspan tcxhref = "20120521" title = "Llamar 2012-05-21, via 3CX"> 2012-05-21, </tcxspan> </tcxspan> </tcxspan> accedido <tcxspan tcxhref = "201205022" title = "Llamar <tcxspan tcxhref =" 201205022 "title = "Llame al <tcxspan tcxhref =" 201205022 "title =" Llame al 2012-050-22. vía 3CX "> 2012-050-22. </tcxspan> vía 3CX"> <tcxspan tcxhref = "201205022" title = "Llame al 2012-050-22. vía 3CX"> 2012-050-22. </tcxspan> </tcxspan> vía 3CX "> 2012-050-22. </tcxspan>
- ^ "El módulo de carga presurizada Cygnus completa la prueba de presión de prueba" . Ciencias Orbitales. Agosto de 2010. Archivado desde el original el 17 de abril de 2013 . Consultado el 16 de marzo de 2015 .
La escotilla PCM tiene un gran parecido con las escotillas actuales utilizadas en el segmento estadounidense de la ISS.
Sin embargo, a 37 pulgadas de cada lado, es algo más pequeño que la escotilla ISS de 50 pulgadas.
- ^ "El primer módulo de la estación espacial de China se prepara para el despegue" . Noticias espaciales. 1 de agosto de 2012. Archivado desde el original el 17 de septiembre de 2012 . Consultado el 3 de septiembre de 2012 .
- ^ "Diferencias entre Shenzhou-8 y Shenzhou-7" . CCTV. 31 de octubre de 2011. Archivado desde el original el 28 de marzo de 2016 . Consultado el 17 de marzo de 2015 .
Habrá un pasaje cilíndrico de 800 milímetros que conectará Shenzhou-8 y Tiangong-1.
- ^ Clark, Stephen (18 de junio de 2012). "Los astronautas chinos abren la puerta en el laboratorio de investigación en órbita" . Vuelo espacial ahora . Consultado el 17 de marzo de 2015 .
Jing flotó a través del estrecho pasaje de 31 pulgadas que conducía a Tiangong 1
- ^ Qiu Huayon; Liu Zhi; Shi Junwei; Zheng Yunqing (agosto de 2015). "Nacimiento del sistema de acoplamiento chino". ¡Vamos, Taikonauts! . No. 16. p. 12.
- ^ a b c Estándar internacional del sistema de acoplamiento (PDF) (Rev. C ed.). 20 de noviembre de 2013. Archivado desde el original (PDF) el 16 de diciembre de 2013.
- ^ "Estado de la Dirección de Misión de Operaciones y Exploración Humana (HEO)" (PDF) . NASA. 2013-07-29 . Consultado el 19 de marzo de 2014 .
- ^ "QinetiQ Space gana el contrato de la ESA para el mecanismo de atraque de atraque internacional" . Espacio Ref Business .
- ^ "Módulo de acoplamiento Apollo ASTP" . Astronautix . Consultado el 7 de abril de 2018 .
- ↑ a b c Hartman, Dan (23 de julio de 2012). "Estado del programa de la Estación Espacial Internacional" (PDF) . NASA . Consultado el 10 de agosto de 2012 .
- ↑ a b Hartman, Daniel (julio de 2014). "Estado de la ISS USOS" (PDF) . Comité HEOMD del Consejo Asesor de la NASA . Consultado el 26 de octubre de 2014 .
- ^ Pietrobon, Steven (20 de agosto de 2018). "Manifiesto de lanzamiento comercial ELV de Estados Unidos" . Consultado el 21 de agosto de 2018 .
- ↑ Bayt, Rob (26 de julio de 2011). "Programa de tripulación comercial: Tutorial de requisitos clave de conducción" . NASA. Archivado desde el original el 28 de marzo de 2012 . Consultado el 27 de julio de 2011 .
- ↑ a b c d Morring, Frank, Jr. (22 de marzo de 2011). "¿El fin de la basura espacial?" . Semana de la aviación . Consultado el 21 de marzo de 2011 .
ViviSat, una nueva empresa conjunta 50-50 de US Space y ATK, está comercializando una nave espacial de reabastecimiento de combustible por satélite que se conecta a una nave espacial objetivo utilizando el mismo enfoque de sonda en el motor de arranque que MDA, pero no transfiere su combustible. . En cambio, el vehículo se convierte en un nuevo tanque de combustible, usando sus propios propulsores para proporcionar control de actitud para el objetivo. ... [el concepto de ViviSat] no está tan avanzado como MDA. ... Además de extender la vida útil de un satélite sin combustible, la compañía también podría rescatar naves espaciales alimentadas como
AEHF-1
acoplándolo en su órbita baja, usando su propio motor y combustible para colocarlo en la órbita correcta, y luego moviéndose hacia otro objetivo.
- ^ "Intelsat elige MacDonald, Dettwiler and Associates Ltd. para el servicio de satélites" . comunicado de prensa . Grupo CNW. Archivado desde el original el 12 de mayo de 2011 . Consultado el 15 de marzo de 2011 .
MDA planeaba lanzar su vehículo de Servicio de Infraestructura Espacial ("SIS") a una órbita casi geosincrónica, donde daría servicio a satélites comerciales y gubernamentales que necesitaran combustible adicional, reposicionamiento u otro tipo de mantenimiento. La primera misión de reabastecimiento de combustible estaría disponible 3,5 años después del comienzo de la fase de construcción. ... Los servicios prestados por MDA a Intelsat en virtud de este acuerdo están valorados en más de 280 millones de dólares.
- ↑ de Selding, Peter B. (14 de marzo de 2011). "Intelsat se inscribe en el servicio de reabastecimiento de combustible por satélite" . Noticias espaciales . Archivado desde el original el 24 de mayo de 2012 . Consultado el 15 de marzo de 2011 .
si la nave espacial MDA funciona según lo planeado, Intelsat pagaría un total de unos 200 millones de dólares a MDA.
Esto asumió que cuatro o cinco satélites recibirían alrededor de 200 kilogramos de combustible a cada uno.
- ^ "Visión general corporativa de ViviSat" . sitio web de la empresa . ViviSat. Archivado desde el original el 24 de enero de 2018 . Consultado el 28 de marzo de 2011 .
- ↑ de Selding, Peter B. (18 de marzo de 2011). "Intelsat se inscribe en el servicio de reabastecimiento de combustible por satélite de MDA" . Noticias espaciales . Archivado desde el original el 21 de marzo de 2012 . Consultado el 20 de marzo de 2011 .
más de 40 tipos diferentes de sistemas de abastecimiento de combustible ... SIS llevará suficientes herramientas para abrir el 75 por ciento de los sistemas de abastecimiento de combustible a bordo de satélites que ahora se encuentran en órbita geoestacionaria. ... MDA lanzará el servicer SIS, que se reunirá y se acoplará al satélite Intelsat, adhiriéndose al anillo alrededor del motor de impulso de apogeo del satélite. Con los equipos de tierra controlando los movimientos, el brazo robótico SIS alcanzará a través de la boquilla del motor de apogeo para encontrar y desenroscar la tapa de combustible del satélite. El vehículo SIS volverá a cerrar la tapa de combustible después de entregar la cantidad acordada de propulsor y luego se dirigirá a su próxima misión. ... La clave del modelo de negocio es la capacidad de la MDA para lanzar botes de combustible de repuesto que serían manipulados por SIS y utilizados para repostar docenas de satélites durante un período de años.Estos botes serían mucho más livianos que el vehículo SIS y, por lo tanto, mucho menos costosos de lanzar.
- ^ NASA (2008). "El sistema de captura suave y encuentro" . NASA . Consultado el 22 de mayo de 2009 .
- ↑ Parma, George (20 de mayo de 2011). "Descripción general del sistema de acoplamiento de la NASA y el estándar internacional del sistema de acoplamiento" (PDF) . NASA. Archivado desde el original (PDF) el 15 de octubre de 2011 . Consultado el 11 de abril de 2012 .
- ^ a b Ma, Zhanhua; Ma, Ou & Shashikanth, Banavara (octubre de 2006). "Control óptimo para que las naves espaciales se encuentren con un satélite en movimiento a corta distancia" (PDF) . Actas de la Conferencia internacional IEEE / RSJ de 2006 sobre sistemas y robots inteligentes : 4109–4114. Archivado desde el original (PDF) el 5 de junio de 2013 . Consultado el 9 de agosto de 2011 .
Una de las tareas más desafiantes para el servicio de satélites en órbita es encontrar y capturar un satélite no cooperativo, como un satélite en movimiento.
- ↑ a b Clark, Stephen (4 de julio de 2007). "Las pruebas de servicio de satélites en el espacio llegan a su fin" . Vuelo espacial ahora . Consultado el 20 de marzo de 2014 .
- ^ Xu, Wenfu (septiembre de 2010). "Encuentro autónomo y captura robótica de objetivo no cooperativo en el espacio" . Robotica . 28 (5): 705–718. doi : 10.1017 / S0263574709990397 . Consultado el 16 de noviembre de 2014 .
- ^ Yoshida, Kazuya (2004). "Dinámica, control y emparejamiento de impedancias para la captura robótica de un satélite no cooperativo". Robótica avanzada . 18 (2): 175-198. doi : 10.1163 / 156855304322758015 .
- ^ "Dzhanibekov" . Astronautix.com . Consultado el 5 de agosto de 2013 .
- ^ "Savinykh" . Astronautix.com . Consultado el 5 de agosto de 2013 .
- ^ "Control óptimo de encuentro y acoplamiento con un satélite no cooperativo" (PDF) . Universidad Estatal de Nuevo México. Archivado desde el original (PDF) el 5 de junio de 2013 . Consultado el 9 de julio de 2011 .
La mayor parte de la investigación actual y todas las misiones pasadas tienen como objetivo capturar solo satélites muy cooperativos.
En el futuro, es posible que también necesitemos capturar satélites no cooperativos, como los que caen en el espacio o no están diseñados para ser capturados.
- ↑ a b Tooley, Craig (25 de mayo de 2010). "Una nueva empresa espacial de exploración" (PDF) . NASA . Consultado el 25 de junio de 2012 .
- ^ Ambrose, Rob (noviembre de 2010). "Hoja de Ruta de Robótica, Tele-Robótica y Sistemas Autónomos (Borrador)" (PDF) . NASA . Consultado el 25 de junio de 2012 .
También se necesita un sistema de acoplamiento común más pequeño para naves espaciales robóticas para permitir la AR&D de naves espaciales robóticas dentro de las envolventes de captura de estos sistemas. El ensamblaje de los vehículos grandes y escenarios utilizados para misiones de exploración más allá de LEO requerirá nuevos mecanismos con nuevos envolventes de captura más allá de cualquier sistema de acoplamiento utilizado actualmente o en desarrollo. Se necesita el desarrollo y la prueba de captura robótica autónoma de vehículos objetivo no cooperativos en los que el objetivo no tiene ayudas de captura, como dispositivos de agarre o mecanismos de acoplamiento, para respaldar el servicio / rescate de satélites.
- ^ a b Concepto de vehículo de exploración espacial 2010
- Sistemas de atraque de naves espaciales
- Encuentro espacial
- Componentes de la nave espacial